
Robotların yakında arama kurtarma görevlerini, denetimleri ve karmaşık bakım operasyonlarını otonom olarak tamamlayabilmesi hedefleniyor. Ancak mağaralar, yapılandırılmamış alanlar ve yıkık binalar gibi birçok ortamda GPS sistemlerinin çalışmaması, otonom navigasyonun önündeki en büyük engeldi. Pekin Teknoloji Enstitüsü'ndeki araştırmacılar, bu sorunu aşmak için doğadan ilham alan, GPS teknolojisine ihtiyaç duymayan yeni bir sistem geliştirdi. Cell Press'te yayınlanacak olan makalede detaylandırılan çerçeve, böcek, kuş ve kemirgenlerde gözlemlenen üç farklı biyolojik navigasyon stratejisini birleştiriyor.
TEK SİSTEMDE ÜÇ STRATEJİ
Makalenin baş yazarı Sheikder Chandan, Tech Xplore'a yaptığı açıklamada, mevcut robotik çalışmalarının genellikle bir karıncanın yol entegrasyonu veya bir sıçanın bilişsel haritalaması gibi tek bir hayvandan alınan stratejilere odaklandığını belirtti. Chandan, bu yaklaşımın, doğada birden fazla stratejinin bir arada çalışarak sağladığı "dejenerasyon" (işlevsel yedeklilik) ilkesini gözden kaçırdığını vurguladı.
Ekip, tek bir tür yerine bu üç hayvan kategorisinde gözlemlenen en etkili stratejileri tek bir nöromorfik çerçevede birleştirerek, geleneksel navigasyonun enerji tüketimi ve duyusal kırılganlık gibi temel sınırlamalarını aşmayı hedeflediklerini belirtti.
BÖCEK, KUŞ VE KEMİRGEN MODELİ
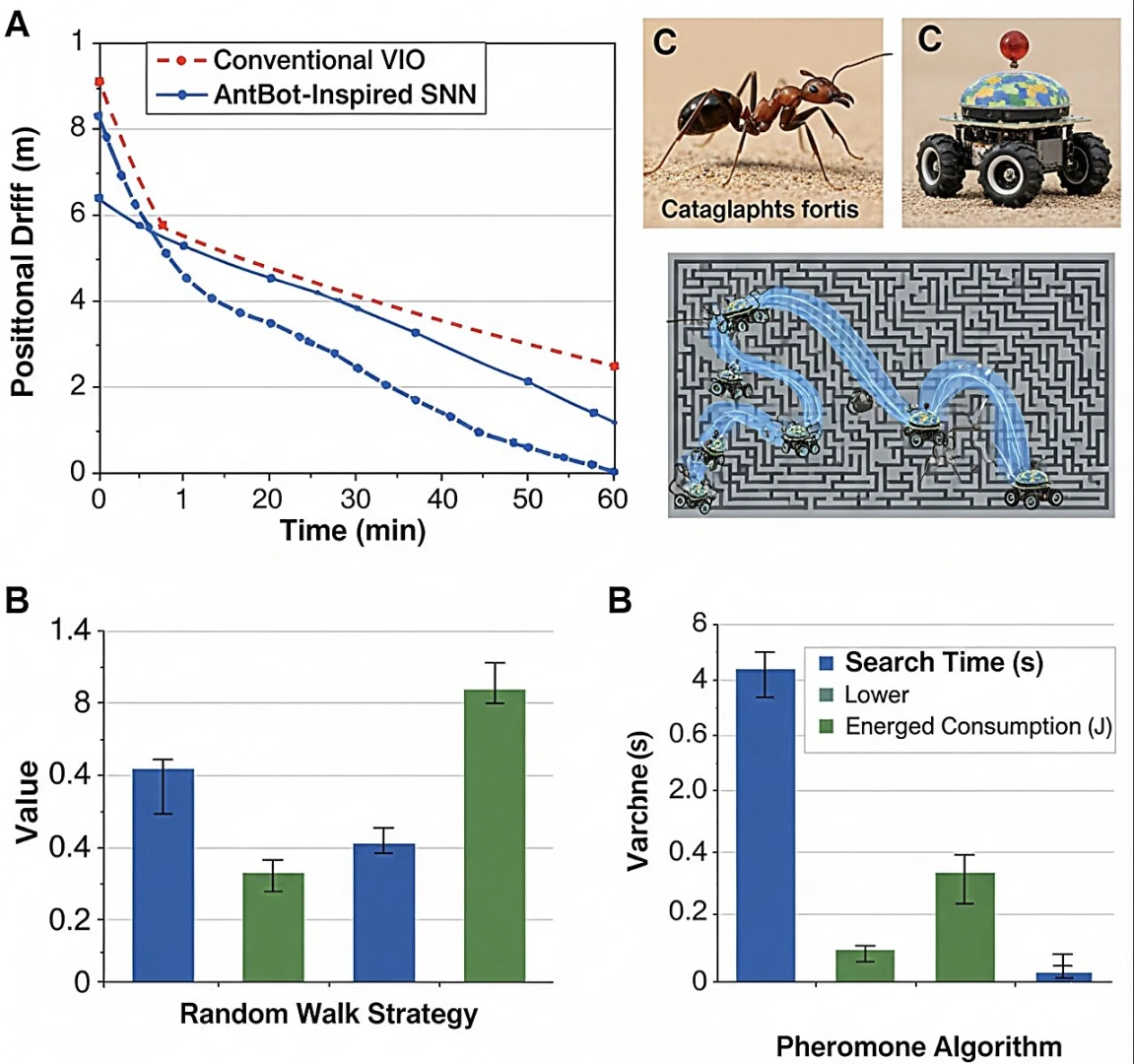
Ekibin çerçevesi, robotun navigasyonunu topluca destekleyen üç ana bileşenden oluşuyor. Chandan, sistemi açıklarken, ilk olarak böceklerden ilham alan ve düşük güç tüketimli nöromorfik donanım üzerine kurulu bir "yol entegratörünün", robot için güçlü bir dahili "adım sayacı" görevi gördüğünü açıkladı.
İkinci olarak, kuşlardan ilham alan çok duyulu füzyon sistemi, göçmen kuşların birden fazla ipucunu (görme, manyetizma, polarizasyon) nasıl kullandığını taklit ediyor. Bu sistem, bir kuantum manyetometresi, bir polarizasyon pusulası ve görme duyusundan gelen girdileri dinamik olarak birleştirerek bir sensör arızalansa bile güvenilir bir yön sağlıyor.
ENERJİ VERİMLİ HARİTALAMA
Üçüncü olarak, kemirgenlerden esinlenen bilişsel haritalama sistemi, beynin hipokampüsünün enerji verimliliğini yansıtıyor. Sistem, yalnızca belirgin dönüm noktalarını veya işaretleri tespit ettiğinde haritayı güncelleyerek mekansal bir hafıza yaratıyor ve enerji tasarrufu sağlıyor.
Doğadan ilham alan sistemlerinin potansiyelini değerlendirmek için araştırmacılar, 23 farklı robotik platform kullanarak terk edilmiş madenler ve yoğun ormanlar da dahil olmak üzere karmaşık gerçek dünya ortamlarında kapsamlı saha denemeleri gerçekleştirdi.
ARIZADAN HIZLI KURTULMA
Chandan, sistemin geleneksel SLAM (Eşzamanlı Yerelleştirme ve Haritalama) yöntemleriyle kıyaslandığını ve konumsal kaymada %41 azalma, %60'a kadar daha yüksek enerji verimliliği ve sensör arızalarından %83 daha hızlı kurtarma performansı gösterdiğini belirtti. Sistemin benzersiz avantajının "dejenerasyon" olduğunu; bir bileşen bozulduğunda diğerlerinin sorunsuz bir şekilde devreye girerek izole sistemlerin sahip olmadığı bir hata toleransı sağladığını vurguladı. Ekip, testler sırasında birincil kamera körlendiğinde bile sistemin sadece 3 saniyeden biraz fazla bir sürede doğru konumlandırmayı yeniden sağladığını kaydetti.
GELECEK HEDEFİ: SÜREKLİ ÖĞRENME
Chandan, bu çalışmanın, çökmüş binalarda gezinme, diğer gezegenlerde keşif veya derin deniz görevleri gibi GPS'in olmadığı ve arızanın söz konusu olamayacağı ortamlarda uzun süreli çalışabilen robotlar için "resmi bir plan" sunduğunu belirtti. Araştırmacılar şu anda, robotların navigasyonunu daha gerçekçi hale getirmek için biyolojik sistemlerdeki gibi sürekli öğrenme yeteneklerini donanıma entegre etmeyi planlıyorlar.









